

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-01-03
Encodeur et aperçu de l'application <br> Le codeur est un dispositif électromécanique qui peut être utilisé pour mesurer le mouvement mécanique ou la position cible. La plupart des encodeurs utilisent des capteurs optiques pour fournir des signaux électriques sous la forme de trains d'impulsions, qui à leur tour peuvent être convertis dans des informations de mouvement, de direction ou de position.
Les encodeurs rotatifs peuvent être utilisés pour mesurer le mouvement de rotation de l'arbre. La figure 1 montre les composants de base d'un encodeur rotatif, y compris une diode émettrice de lumière (LED), une roue de code et un capteur de lumière à l'arrière de la roue de code. Cette roue de code est placée sur un arbre rotatif avec des zones opaques en forme de ventilateur en forme de ventilateur disposées sous une forme codée. Lorsque la roue de code tourne, les secteurs opaques bloquent la lumière et les secteurs de transmission de lumière permettent à la lumière de passer. Cela produit des impulsions à ondes carrées qui peuvent être compilées en position correspondante ou des informations de mouvement. L'encodeur est généralement divisé en 100 à 6000 secteurs par révolution. Cela montre qu'un encodeur à 100 secteurs peut fournir une précision de 3,6 degrés tandis qu'un encodeur à 6000 secteurs peut fournir une précision de 0,06 degrés.
Les encodeurs linéaires fonctionnent comme des encodeurs rotatifs. Il utilise une bande fixe et opaque pour remplacer l'encodeur rotatif, avec quelques lacunes transmises légères sur la surface de la bande opaque, et l'ensemble de détecteur LED est fixé au corps en mouvement.

Figure 1. Composants d'un encodeur optique
Un seul codeur de sortie d'impulsion ne peut pas déterminer l'angle de rotation, il n'est donc pas utile. Si deux canaux de code sont utilisés et que la différence de phase entre leurs secteurs est de 90 degrés (comme le montre la figure 2), les deux canaux de sortie du codeur en quadrature peuvent déterminer les deux informations de position et de rotation. Par exemple, si le canal A mène la phase, le codeur tourne dans le sens des aiguilles d'une montre. Si le canal B mène la phase, la roue de code tourne dans le sens antihoraire. Par conséquent, en surveillant le nombre d'impulsions et les informations de phase relative entre les signaux A, B, il est possible d'obtenir la position et les informations de direction de la rotation en même temps.
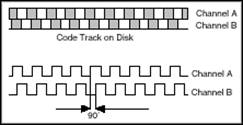
Figure 2. Signaux de sortie des encodeurs en quadrature A et B
De plus, certains encodeurs en quadrature incluent également un troisième canal de sortie appelé signal zéro ou signal de référence. Une seule impulsion est sortie pour chaque rotation de ce canal. Vous pouvez utiliser cette impulsion unique pour calculer avec précision une position de référence. Dans la plupart des encodeurs, ce signal est appelé axe z ou index.
Jusqu'à présent, cet article a introduit un encodeur à quadrature incrémentiel unique. Parce que les signaux A et B sont référencés au sol, ils sont appelés seuls et chaque signal n'a qu'une (ou une seule) ligne. Un autre encodeur couramment utilisé est un encodeur différentiel, et ses signaux A et B ont deux fils. Les deux lignes du signal A sont A 'et A, et les deux lignes du signal B sont respectivement B' et B. Étant donné que ces quatre lignes produisent toujours un niveau connu (0V ou VCC), cette structure est également appelée structure push-pull. Lorsque A est VCC, A 'est 0V. Inversement, lorsque A est 0V, A 'est VCC. Dans le cas d'un encodeur unique, A est soit VCC ou flottant. L'utilisation de la détection différentielle peut assurer la précision du signal, de sorte que les encodeurs différentiels peuvent généralement être utilisés dans des environnements avec un grand bruit électrique.
Avec un codeur incrémentiel, seules les informations de changement de position (à partir de laquelle la vitesse de mouvement et l'accélération peuvent être calculées) peuvent être mesurées, mais la position absolue de la cible ne peut pas être déterminée. Ici, nous présenterons un troisième type d'encodeur: Encodeur absolu, qui peut obtenir la position absolue de la cible. Cet encodeur, comme le codeur incrémentiel, a des secteurs opaques alternés et des secteurs transparents. Cependant, un encodeur absolu utilise une zone multi-composants sur la roue de code de l'encodeur pour former un canal de code concentrique, tout comme un anneau cible. Le chemin du code concentrique commence à partir du centre du code de l'encodeur et s'étend vers l'extérieur jusqu'à l'extérieur de la carte code. Chaque canal de code a deux fois la partition que sa couche intérieure. La première couche, le canal de code le plus interne, n'a qu'un seul secteur de transmission de lumière et un secteur opaque; La deuxième couche au centre a deux secteurs de transmission de lumière et deux secteurs opaques; Et il y a quatre secteurs de transmission de lumière et des secteurs opaques pour le troisième canal de code. Si l'encodeur a 10 canaux de code de couche, le canal de code le plus extérieur a 512 secteurs; S'il y a 16 canaux de code de couche, le canal de code le plus extérieur compte 32 767 secteurs.
Étant donné que l'encodeur absolu a plus d'un nombre de secteurs par canal de code que celui à l'intérieur, le nombre de secteurs forme un système de comptage binaire. Dans ce type d'encodeur, chaque canal de code sur la roue de code correspond à une source lumineuse et à un récepteur. Cela signifie qu'un encodeur à 10 couches nécessite 10 groupes de sources de lumière et de récepteurs, tandis qu'un encodeur de 16 couches nécessite 16 groupes de sources de lumière et de récepteurs.
L'avantage d'un encodeur absolu est que vous pouvez réduire la vitesse de l'encodeur et faire en sorte que le codeur de l'encodeur ne fasse qu'une seule révolution pendant tout le cycle de mouvement de la machine. Si la machine parcourt 10 pouces et que le codeur a 16 bits de précision, la précision de la position de la machine est de 10/65 536, ou 0,00015 pouces. Si la machine se déplace plus longtemps, comme 6 pieds, alors un encodeur rotatif grossier peut s'assurer que chaque pied est suivi; Une deuxième étape, appelée encodeur rotatif fin, peut suivre les distances à moins de 1 pied. Cela signifie que vous pouvez ajuster le codeur grossier afin qu'il tourne sur toute la distance de 6 pieds; Vous pouvez également ajuster le codeur mince afin qu'il puisse résoudre une plage de 1 pied (ou 12 pouces).
Comment mesurer à l'aide d'un encodeur <br> Pour utiliser un encodeur pour la mesure, il doit y avoir un dispositif électronique de base, le compteur. Le compteur de base génère une valeur à travers ses plusieurs canaux d'entrée pour indiquer le nombre de bords détectés (c'est-à-dire les changements de faible à élevé ou élevé à faible dans la forme d'onde). La plupart des compteurs ont trois coups interdépendants-seuil, source et sélection haut / bas. Le compteur enregistre le nombre d'événements dans l'entrée source et compte vers le haut ou vers le bas en fonction de l'état de la ligne de sélection haut / bas. Par exemple: si le bit d'état haut / bas est "élevé", le compteur compte; Si le bit d'état haut / bas est "bas", le compteur compte. La figure 3 montre un diagramme de bloc de compteur simplifié.

Figure 3. Modèle simplifié du compteur
Les encodeurs ont généralement 5 fils qui doivent être connectés. Différents encodeurs, la couleur de ces lignes n'est pas la même. Vous pouvez utiliser ces fils pour alimenter l'encodeur et lire les signaux A, B et Z. La figure 4 montre une définition d'interface typique pour un encodeur incrémentiel.

Figure 4. Interface de l'encodeur incrémental
L'étape suivante consiste à décider où ces lignes doivent être connectées. Comme mentionné ci-dessus, le signal A est connecté à la borne source et les impulsions dans son signal sont comptées. Le signal B est connecté au port de sélection haut / bas. Connectez n'importe quelle alimentation + 5V CC aux connexions d'alimentation et de sol dans la plupart des cas, une seule ligne numérique pour un dispositif d'acquisition de données est suffisante.
Étant donné que les bords du signal sont comptés, la prochaine chose que vous devez considérer est de savoir comment ces valeurs doivent être converties en informations de position. Le processus de conversion de la valeur du bord en informations de position dépend du type de codage utilisé. Il existe trois types de base de codage: x1, x2 et x4.
Encodage x1
La figure 5 montre le nombre de dénombrements plus minus pour une période de quadrature et son type de codage x1 correspondant. Lorsque le canal A entraîne le canal B, l'incrément se produit sur le bord montant du canal A. Lorsque le canal B mène le canal A, la diminution se produit au bord de la chute du canal A.
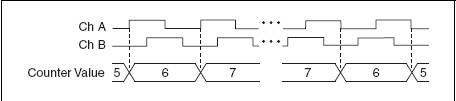
Figure 5. Encodage x1
Codage x2
Le codage x2 est similaire au processus ci-dessus, sauf que chaque nombre de bords du compteur A un canal est incrémenté ou décrémenté, selon le canal canalisé. La valeur du compteur augmentera de 2 ou diminuera de 2 chaque cycle, comme le montre la figure 6.

Figure 6. Encodage x2
Codage x4
Dans le mode de codage X4, le compteur augmente ou diminue également sur chaque bord des canaux A et B. Que le nombre de compteurs augmente ou diminue dépend du canal qui mène le canal. Le nombre de compteurs augmentera de 4 ou diminuera de 4 à chaque cycle.
Une fois que vous avez défini le type de codage et le type de nombre d'impulsions, vous pouvez utiliser la formule suivante pour convertir les informations numériques en informations de position:
Pour la position de rotation
Montant de rotation ![]()
Où n = nombre d'impulsions générées par l'encodeur pendant chaque rotation de l'arbre
x = type de codage
Pour position linéaire
Déplacement ![]()
Où ppi = impulsion par pouce (ce paramètre se rapporte au codeur sélectionné)
La connexion de l'encodeur à l'instrument <br> Dans cette section, prenez le châssis NI CDAQ-9172 et le module d'E / S numérique Ni 9401 C à l'exemple. L'utilisation de différents instruments et équipements de mesure est similaire à ce processus.
Équipement utilisé:
CDAQ-9172: Châssis USB Hi-Speed Ni CompactDAQ 8-SLOT
NI 9401: 8 canaux, 5 V / TTL à grande vitesse, module d'E / S numérique bidirectionnel
24 Pulse / Rotation Quadrature Encodeur
Le NI 9401 a un connecteur D-Sub qui fournit une connectivité pour 8 canaux numériques. Chaque canal a un port d'E / S numérique qui peut être connecté à un périphérique d'entrée ou de sortie numérique. Ce n'est qu'à travers les 5e et 6e emplacements du châssis que vous pouvez vous connecter aux deux compteurs du CDAQ-9172; Par conséquent, insérez le 9401 dans la 5e place.
Selon ces spécifications, la connexion A sur le codeur est connectée à la broche 14 et la connexion B est connectée à la broche 17 et "5 VDC Power" est connectée à toute ligne de chiffre inutilisée définie sur "High". "" Connectez-vous à n'importe quel port com.
Commencer à mesurer
Maintenant que l'encodeur a été connecté au périphérique de mesure, vous pouvez utiliser le logiciel de programmation graphique NI LabView pour transférer ces données sur un ordinateur pour observation et analyse.
Extrait de: NI "Général Guide de mesure"
Partager sur:
Envoyer Une Demande
Ms. carol Dong
Numéro De Téléphone:86-431-85543703
Fax:86-431---88634119
Portable:+8613894866263
E-mail :sales@encoders.com.cn
Adresse De Compagnie:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
site mobile
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.