

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-09
Un encodeur est un appareil qui compile et convertit un signal (tel qu'un flux bit) ou des données en un formulaire qui peut être utilisé pour la communication, la transmission et le stockage. Le codeur convertit un déplacement angulaire ou un déplacement linéaire en un signal électrique, le premier étant appelé une roue de code et le second étant appelé une règle de code. Selon le mode de lecture, l'encodeur peut être divisé en type de contact et type sans contact; Selon le principe de travail, l'encodeur peut être divisé en deux types: type incrémentiel et type absolu. Le codeur incrémentiel convertit le déplacement en un signal électrique périodique, qui est ensuite converti en une impulsion de comptage, et le nombre d'impulsions est utilisé pour représenter l'amplitude du déplacement. Chaque position du codeur absolu correspond à un certain code numérique, donc son indication n'est liée qu'aux positions de début et de fin de la mesure, quel que soit le processus intermédiaire de la mesure.

Selon le principe de détection, le codeur peut être divisé en optique, magnétique, inductif et capacitif. Selon sa méthode d'étalonnage et sa forme de sortie de signal, il peut être divisé en trois types: incrémentiel, absolu et hybride.
1.1 Encodeur incrémental Le codeur incrémentiel sortira directement trois ensembles de phases d'impulsion A, B et Z de l'onde carrée par principe de conversion photoélectrique; La différence de phase entre les impulsions A et B est de 90 degrés, de sorte que la direction de rotation peut être facilement déterminée. La phase Z est d'une impulsion par révolution et est utilisée pour le positionnement des points de référence. Son avantage est que la structure principale est simple, la durée de vie mécanique moyenne peut être supérieure à des dizaines de milliers d'heures, la capacité d'anti-interférence est forte, la fiabilité est élevée et elle convient à la transmission à longue distance. L'inconvénient est que les informations de position absolue de la rotation de l'arbre ne peuvent pas être sorties.
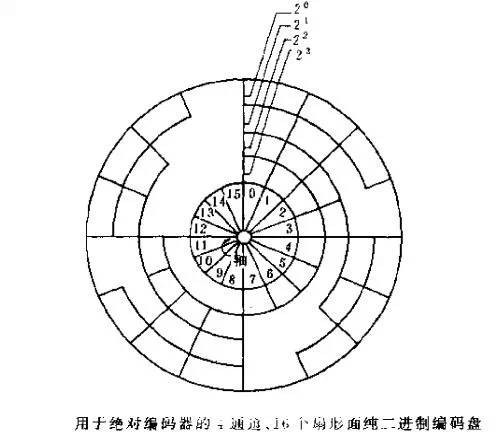
1.2 Encodeur absolu Le codeur absolu est un capteur numérique à sortie directe. Il y a plusieurs disques concentriques dans la direction radiale sur son disque circulaire. Chaque voie a un secteur transparent et opaque. Le secteur du canal de code adjacent est doublé. Le nombre de canaux de code sur la roue de code est le nombre de bits de son chiffre binaire. D'un côté du disque se trouve la source lumineuse, et de l'autre côté, il y a un élément photosensible correspondant à chaque canal de code. Lorsque le disque est dans différentes positions, chaque élément photosensible convertit un signal de niveau correspondant en fonction de son éclairage ou non et forme un nombre binaire. La caractéristique de ce type d'encodeur est qu'elle ne nécessite pas de compteur, et un code numérique fixe correspondant à la position peut être lu à n'importe quelle position de l'arbre rotatif. De toute évidence, devez-vous dire n? À l'heure actuelle, il y a 16 produits d'encodeur absolus en Chine.
1.3 Encodeur absolu hybride Encodeur absolu hybride, qui publie deux ensembles d'informations, un ensemble d'informations est utilisé pour détecter la position du pole magnétique, avec une fonction d'information absolue; L'autre ensemble est complètement le même que les informations de sortie du codeur incrémentiel.
Deuxièmement, l'application de l'encodeur photoélectriqueLa différence entre l'encodeur incrémentiel et l'encodeur absolu
1, mesure de l'angle
Le simulateur de conduite en voiture utilise un codeur photoélectrique comme capteur pour mesurer l'angle de direction du volant. L'instrument de mesure de la gravité adopte un encodeur photoélectrique et relie son arbre rotatif à l'arbre du bouton de compensation de l'instrument de mesure de la gravité. Le compteur d'angle de torsion utilise le codeur pour mesurer le changement de l'angle de torsion, tel que la machine d'essai de torsion et le test de pêche à la torsion par canne à pêche. La machine d'essai d'impact du pendule utilise le codeur pour calculer l'impact en tant que changement de l'angle de oscillation.
2, mesure de longueur
Le compteur utilise la circonférence du rouleau pour mesurer la longueur et la distance de l'objet.
Le capteur de déplacement du fil mesure la distance de longueur de l'objet en utilisant la circonférence de la roue d'enroulement.
La mesure directe de couplage est combinée avec la broche de l'unité de puissance qui entraîne le déplacement linéaire et est mesurée par le nombre d'impulsions de sortie.
Détection des supports, dans le rack droit, le pignon de chaîne de la chaîne rotative, la poulie de synchronisation, etc. pour transmettre des informations de déplacement linéaire.
3, mesure de la vitesse
Vitesse de ligne, mesurer la vitesse de la ligne de la ligne de production en se connectant au compteur
Vitesse angulaire, mesurer la vitesse d'un moteur, un arbre, etc. par un codeur
4, mesure de la position
Du côté de la machine, la position de coordonnées de chaque point de coordonnée de la machine-outil, comme une forte presse, etc.
En termes de contrôle d'automatisation, le contrôle effectue l'action spécifiée en position pastorale. Comme les ascenseurs, les palans, etc.
5, contrôle synchrone
Grâce à la vitesse angulaire ou à la vitesse linéaire, la liaison de transmission est contrôlée de manière synchrone pour atteindre le contrôle des tensions.
Troisièmement, encodeur incrémentiel (type rotatif)
1, Principe de travail:
Un disque de code optique avec un arbre au centre, avec une passe annulaire et une ligne gravée sombre, lue par un dispositif de transmission et de réception photoélectrique, et quatre ensembles de signaux d'onde sinusoïdale sont combinés en A, B, C, D, chaque sinus sinusque Ondulez une différence de phase de 90 degrés (360 degrés par rapport à un cycle), inversez les signaux C et D, superposés aux phases A et B pour améliorer le signal stable; et sortir une impulsion en phase z par révolution pour représenter le bit de référence zéro.
Étant donné que les deux phases A et B sont de 90 degrés hors phase, le codeur peut être obtenu en comparant la phase A avant ou la phase B pour déterminer la rotation avant et inverse du codeur, et l'impulsion de référence nulle peut être utilisée pour obtenir La position de référence zéro de l'encodeur.
Le matériau du disque de code d'encodeur est le verre, le métal et le plastique. Le disque de code de verre est déposé sur le verre avec une ligne gravée très mince. La stabilité thermique est bonne et la précision est élevée. Le disque de code métallique est directement passé et la ligne n'est pas rompue. Cependant, en raison de la certaine épaisseur du métal, la précision est limitée et sa stabilité thermique est un ordre de grandeur pire que celle du verre. Le disque du code en plastique est économique et son coût est faible, mais la précision, la stabilité thermique et la vie sont toutes deux pauvres. .
Résolution - Le nombre de passes ou de lignes sombres que le codeur fournit à 360 degrés par révolution est appelée résolution, également appelée indexation de résolution, ou des lignes directement numérotées, généralement 5 à 10000 lignes par révolution.
2, sortie du signal:
La sortie du signal a une onde sinusoïdale (courant ou tension), onde carrée (TTL, HTL), collecteur ouvert (PNP, NPN), type push-pull, TTL est un entraînement différentiel à longue durée (symétrique A, A-; B, B -; Z, Z-), HTL est également appelé Push-Pull, Push-Pull Sortie, l'interface de dispositif de réception du signal du codeur doit correspondre au codeur.
Connexion du signal - Le signal d'impulsion du codeur est généralement connecté au compteur, PLC, à l'ordinateur. Les modules connectés au PLC et à l'ordinateur sont divisés en modules à basse vitesse et modules à grande vitesse. La fréquence de commutation est faible et élevée.
Tels que la connexion monophasée, pour le comptage à sens unique, la mesure de la vitesse à une seule direction.
AB Connexion en deux phases, utilisée pour le comptage vers l'avant et inversé, en jugeant la mesure vers l'avant et l'inverse et la vitesse.
A, b, z connexion triphasée pour la mesure de position avec correction de position de référence.
A, A-, B, B, Z, Connection Z, en raison de la connexion avec un signal négatif symétrique, le courant contribue au champ électromagnétique du câble est 0, l'atténuation est minime, l'anti-interférence est optimale et la longue distance peut être transmise.
Pour les encodeurs TTL avec une sortie de signal négatif symétrique, le signal peut parcourir jusqu'à 150 mètres.
Pour les encodeurs HTL avec une sortie de signal négative symétrique, la distance de transmission du signal est jusqu'à 300 mètres.
3, le problème de l'encodeur incrémentiel:
Les encodeurs incrémentiels ont une erreur cumulative à point zéro, l'anti-interférence est mauvaise, l'équipement de réception doit être éteint et la puissance doit être changée en zéro ou en position de référence. Ces problèmes peuvent être résolus en utilisant un encodeur absolu.
Application générale des encodeurs incrémentiels:
Mesure de la vitesse, mesurer la direction de rotation, mesurer l'angle de mouvement, la distance (relative).
Quatre, encodeur absolu (type rotatif)Il existe de nombreuses lignes de gravure de canaux optiques sur le disque optique de l'encodeur absolu. Chaque ligne est disposée en 2 lignes, 4 lignes, 8 lignes, 16 lignes ... de sorte que chaque position de l'encodeur est lue par chaque ligne. Le passage et l'obscurité du réticule, obtiennent un code binaire unique (code gris) de la puissance Zeroth de 2 à la puissance N-1 de 2, qui est appelé encodeur absolu N bits. Un tel encodeur est déterminé par la position mécanique du disque de code optique, et il n'est pas affecté par les pannes de courant et les interférences.
Les encodeurs absolus sont uniques dans chaque position déterminés par la position mécanique. Ils n'ont pas besoin de se rappeler, n'ont pas besoin de trouver de point de référence et n'ont pas à compter tout le temps, quand connaître la position et quand lire sa position. De cette façon, les caractéristiques anti-jumelles de l'encodeur et la fiabilité des données sont considérablement améliorées.
Des encodeurs absolus à un seul tour aux encodeurs absolus multi-tours
Faites pivoter l'encodeur absolu à un tour à feu pour mesurer les lignes de scribe du codeur photoélectrique en rotation pour obtenir le code unique. Lorsque la rotation dépasse 360 degrés, le code revient à l'origine, qui n'est pas conforme au principe du codage absolu. Le code ne peut être utilisé que pour des mesures dans une plage de 360 degrés de rotation, appelée encodeur absolu à un tour.
Si vous souhaitez mesurer la plage de rotation à 360 degrés, vous devez utiliser un encodeur absolu multi-tours.
Le fabricant d'encodeur utilise le principe du mécanisme de l'équipement de surveillance. Lorsque la roue de code centrale tourne, un autre ensemble de roues de code (ou des ensembles de vitesses, plusieurs ensembles de disques de code) est entraîné par l'équipement et le nombre de virages est augmenté sur la base du codage à un seul tour. Encodage pour étendre la plage de mesure du codeur, un tel encodeur absolu est appelé encodeur absolu multi-tours, qui est également déterminé par détermination de la position mécanique, et chaque code de position est unique et n'a pas besoin d'être mémorisé.
Un autre avantage de l'encodeur multi-tours est qu'en raison de la grande plage de mesure, l'utilisation réelle est souvent plus riche, de sorte qu'il n'est pas nécessaire de trouver un point zéro pendant l'installation, et une position intermédiaire est utilisée comme point de départ, qui Simplifie considérablement la difficulté de l'installation et du débogage.
Partager sur:
Envoyer Une Demande
Ms. carol Dong
Numéro De Téléphone:86-431-85543703
Fax:86-431---88634119
Portable:+8613894866263
E-mail :sales@encoders.com.cn
Adresse De Compagnie:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
site mobile
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.