

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-01
Interface de bus de l'encodeur d'arbre photoélectrique absolu
1 INTRODUCTION Le codeur d'angle de l'arbre photoélectrique absolu est un dispositif de mesure d'angle numérique qui mesure la position angulaire et la vitesse angulaire de l'arbre rotatif en temps réel. Il convertit les informations d'angle d'arbre en codes numériques sous forme de degrés, de minutes et de secondes, et la connexion du bus peut réaliser une mesure en temps réel. Il présente les avantages d'une fiabilité de travail élevée, d'une forte capacité anti-ingérence, d'une haute précision, d'une mémoire de mise hors tension, etc. Il est largement utilisé dans les systèmes de suivi et de positionnement de mesure numérique tels que l'équipement de gamme de tir, la théodolite numérique, le radar et certains grands équipements militaires.
Dans ces systèmes pratiques de contrôle des applications, en raison des différentes structures de données des capteurs et détecteurs de chaque sous-système, le codeur de l'arbre photoélectrique absolu utilisera différentes méthodes de communication de données internes, incluant principalement RS232, RS485 / 488 PORTS SÉRIE, PORTS PARALLERS, etc. . Cependant, dans des applications d'ingénierie spécifiques, les méthodes de communication ci-dessus sont souvent limitées par la distance de transmission et le taux de communication. Ces dernières années, la communication en série s'est développée rapidement et une variété de formes de bus de terrain de système de contrôle ont émergé. Le bus Can est l'un des plus utilisés. Il s'agit de l'abréviation du bus réseau local du contrôleur et est un support efficace pour le contrôle distribué et le contrôle en temps réel. Réseau de communication série. En raison des performances élevées, de la fiabilité élevée et de la conception unique du bus Can, il est devenu le bus de terrain le plus populaire et le plus réel à la maison et à l'étranger. Le développement et les modifications des méthodes de communication interne dans le système de contrôle font que le codeur utilisé pour mesurer le déplacement angulaire et la vitesse angulaire fournissent une interface de bus CAN pour répondre aux exigences de conception des sous-champs de l'ensemble du système de contrôle.
2 Principe de travail et transmission de données de l'encodeur
2.1 Principe de travail L'encodeur se compose de deux parties: un dispositif d'acquisition de données et un dispositif de traitement des données. Le diagramme de blocs structurel est illustré dans 1. Le micro-ordinateur à puce unique est la partie centrale du système de circuit d'encodeur. Après avoir collecté les signaux d'encodeur (code grossier, code fin moyen, code fin), il est subdivisé par le code fin, la correction du canal de code, l'ajout numérique, le réglage de zéro électrique, le traitement de logiciel tel que le degré, la minute et la deuxième conversion, et enfin l'affichage et Réalisez l'interface avec le système de contrôle.
2.2 Transmission de données La transmission des données entre l'encodeur et le système de contrôle peut être utilisée dans les modes parallèles et en série. La transmission parallèle transmet des données à travers le port parallèle. Chaque données nécessite un noyau du câble de données. Par exemple, un câble à 24 cœurs est requis pour un encodeur 24 bits. Par conséquent, l'espace d'utilisation est limité et ne convient qu'à la transmission à courte distance et aux exigences spéciales. occasion. Dans la transmission en série, les informations sur les données sont transmises en série via une paire torsadée, et des bits supplémentaires sont ajoutés en fonction de différents protocoles de communication pour implémenter des fonctions telles que la correction d'erreur. Cette fonction peut être étendue aux systèmes de bus de données. La transmission en série a moins de fils, moins de matériel, de faible coût, une longue distance de transmission et des données sûres et fiables.

2.3 Interface de bus CAN BUDODER proposée Dans la comparaison complète de divers bus de terrain, le système de communication basé sur le bus CAN a de nombreuses caractéristiques excellentes: le signal de données est transmis par tension différentielle; Le milieu de transmission de bus peut utiliser une paire torsatée, un câble coaxial et une fibre optique; peut fonctionner en mode multi-master, mode de communication flexible; peut transmettre et recevoir des données en mode de diffusion point à point, point à multipoint et global; Les informations de nœud sur le réseau peuvent être divisées en différentes priorités pour répondre à différentes exigences en temps réel; Technologie d'arbitrage de bus non destructive; Les données adoptent une structure de trame courte, chaque trame est de 8 octets et le taux d'erreur de données est faible; La sous-couche MAC de la couche de liaison de données dans le protocole de communication a des capacités de détection d'erreur strictes; Il a des normes internationales et une bonne ouverture. Par conséquent, dans la transformation du mode de communication interne du système de suivi photoélectrique, le bus CAN est utilisé comme structure de bus de communication de données, puis l'interface de bus CAN encodeur est proposée.
3 Application de l'interface de bus de boîte d'encodeur dans le système de suivi photoélectrique
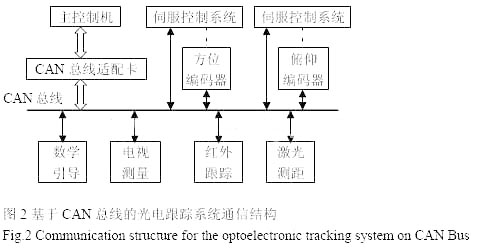
3.1 L'encodeur est utilisé pour la détection de position du système de suivi photoélectrique. Le codeur de l'axe photoélectrique absolu est un capteur pour mesurer l'azimut et l'angle de tangage du système de suivi photoélectrique dans le système de suivi photoélectrique. La structure de bus interne du système de suivi photoélectrique est transformée en méthode de communication du bus CAN. L'interface Bus Bus a les caractéristiques de l'interface flexible et de la sauvegarde de ligne. Dans le même temps, il a un microprocesseur et peut être utilisé comme nœud intelligent dans le système pour envoyer des trames distantes directement à d'autres appareils pour obtenir un contrôle intelligent. La figure 2 est un schéma de structure de communication du système de suivi photoélectrique basé sur le bus CAN. Le système de suivi photoélectrique utilise une seule structure de bus série du bus CAN au lieu de la structure parallèle de plusieurs méthodes de communication. Les angles d'azimut et de tangage mesurés par les deux encodeurs photoélectriques sont envoyés à la machine de contrôle principale via le bus, et la machine de contrôle principale traite les données en conséquence. Grâce au système de commande de commande de commande de bus, tous les sous-systèmes peuvent être connectés ensemble par une paire de paires torsadées, ce qui simplifie le câblage du système, améliore l'utilisation globale du bus du système, la transmission de données en temps réel et l'évolutivité du système, et l'erreur de bit Le taux est considérablement réduit.
3.2 Node d'encodeur
L'interface de bus Can est principalement composée de micro-ordinateur à puce, de contrôleur de bus CAN, de pilote de bus CAN et de matériel d'isolement photoélectrique. Le circuit spécifique de l'interface de communication du bus CAN est illustré à la figure 3.
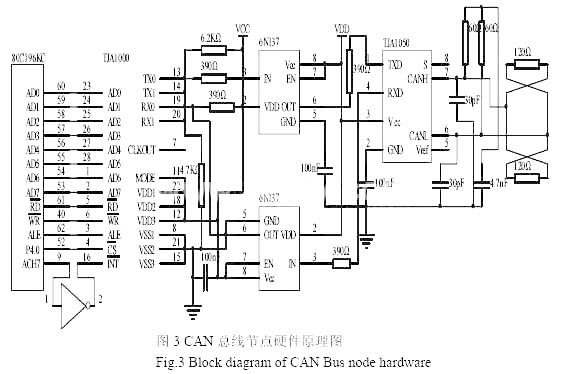
L'ordinateur à puce unique sélectionne Intel80C196KC, qui est un microcontrôleur intégré à 16 bits, qui convient plus aux occasions de contrôle complexes en temps réel. Il est également responsable du traitement des données de l'encodeur et de l'initialisation du nœud de bus CAN. Le contrôleur Can sélectionne SJA1000 de Philips Semiconductor pour réaliser l'interface de communication de données entre le bus et l'ordinateur hôte (ordinateur de contrôle), prend en charge les protocoles Can2.0a et Can2.0b, a un tampon de réception de 64 octets prolongé et prend en charge le premier-in First First First -Prépitaire (FIFO), support des codes d'identification 11 bits et 29 bits, le taux de bit de communication jusqu'à 1 Mbps, peut fonctionner en mode BasicCan et en mode pélican. Le chauffeur de bus CAN choisit Philips TJA1050, qui est un chauffeur de bus CAN à grande vitesse, qui fournit l'interface entre le contrôleur CAN et le bus physique, réalise les fonctions de transmission et de réception différentielles du bus CAN, et possède une large plage de mode commune Sous une forte capacité de réception de différentiel de l'interférence électromagnétique, le niveau d'entrée est compatible avec les appareils 3,3 V et les nœuds non alimentés n'interfèrent pas avec le bus. La jointure de TJA1050 peut assurer une communication de données à grande vitesse. Pour la sécurité et la capacité anti-jumelle améliorée, l'utilisation de bonnes caractéristiques de performance symétriques TJA1050, utilisez des bornes séparées. Deux petits condensateurs de 30pf sont connectés en parallèle entre CANH et CANL et Ground, ce qui peut filtrer les interférences à haute fréquence sur le bus et une certaine capacité à prévenir le rayonnement électromagnétique. Afin d'améliorer encore la capacité anti-ingérence du système, un optocoupleur à grande vitesse 6N137 est utilisé entre le contrôleur CAN SJA1000 et le conducteur CAN TJA1050 pour former un circuit d'isolement pour atteindre l'isolement galvanique. L'alimentation VCC et VDD des deux côtés du 6N137 sont complètement isolées, ce qui peut empêcher le circuit en même temps, deux résistances de correspondance d'impédance de bus 120Ω doivent être connectées aux deux extrémités du bus.
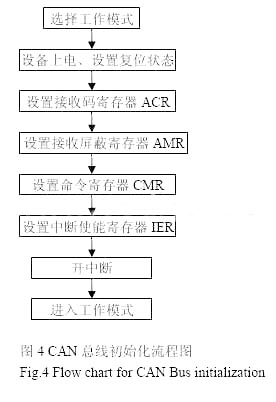
3.3 Conception du logiciel de nœud Les informations sur l'angle (degrés, minutes et secondes) du codeur de l'axe photoélectrique absolu sont envoyées du contrôleur CAN au bus CAN ou du bus CAN au tampon CAN recevoir automatiquement par le contrôleur de bus SJA1000. Son programme de communication d'interface BUS CAN est composé de sous-programmes d'initialisation, d'envoi de sous-programmes et de réception de sous-programmes. Sélectionnez d'abord le mode de travail du bus Can en fonction des besoins réels du système. Ici, sélectionnez le mode pélican, oscillateur en cristal 12 MHz, le taux de transmission de données de bus est défini sur 500 kbits / s, chaque nœud de bus doit définir le même taux de transmission de données pour assurer une communication normale. Déterminez que la connexion physique entre SJA1000 et le MCU est fiable, puis initialise le contrôleur SJA1000. Dans le mode de réinitialisation SJA1000, définissez l'état initial de chaque registre. Le graphique d'écoulement d'initialisation est illustré à la figure 4. La transmission et la réception des données sont accomplies par le sous-programme d'envoi et le sous-programme de réception. L'ID de message détermine le flux de données de nœud. Lors de l'envoi de données, le principe de paramètre du segment du bin de l'indicateur de réception d'ID de message est: L'ID correspondant du nœud qui doit être reçu, le bit est 0 et les bits restants sont 1. Lors de la réception de données, c'est le contraire. Il est jugé par id, qu'il s'agisse d'informations à lui-même. Il est reçu, non filtré.
4. Conclusion
En tant que bus de communication au niveau du terrain, le bus CAN a une forte fiabilité et des performances de coûts. Le codeur de l'arbre photoélectrique absolu avec l'interface de bus CAN le rend plus flexible pour une utilisation dans les systèmes de contrôle.
Cet article est innovant: l'interface de bus CAN de l'encodeur et son application dans le système de suivi photoélectrique
Partager sur:
Envoyer Une Demande
Ms. carol Dong
Numéro De Téléphone:86-431-85543703
Fax:86-431---88634119
Portable:+8613894866263
E-mail :sales@encoders.com.cn
Adresse De Compagnie:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
site mobile
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.